
Human arms have been putting together items in factories for years. Now, new arms, industrial robotic arms, are working in that same respect, at a faster, more accurate rate. In the manufacturing world, one of the most common robots is the robotic arm. This metal arm, usually made up of four to six joints, can be used for several manufacturing applications, including welding, material handling, and material removal. An industrial robot arm is a marvel of engineering in that it reacts similarly to our own arms. The robot arm closely resembles a human arm, with a wrist, forearm, elbow, and shoulder. The six-axis robot has six degrees of freedom, allowing it to move six different ways, unlike the human arm, which has seven degrees of freedom. However, industrial robotic arms move much faster than human arms and, without the proper safety measures, can be dangerous. Therefore, the AI system competency is to design and implement an application to simulate robot arm tasks to reduce risk and increase productivity.
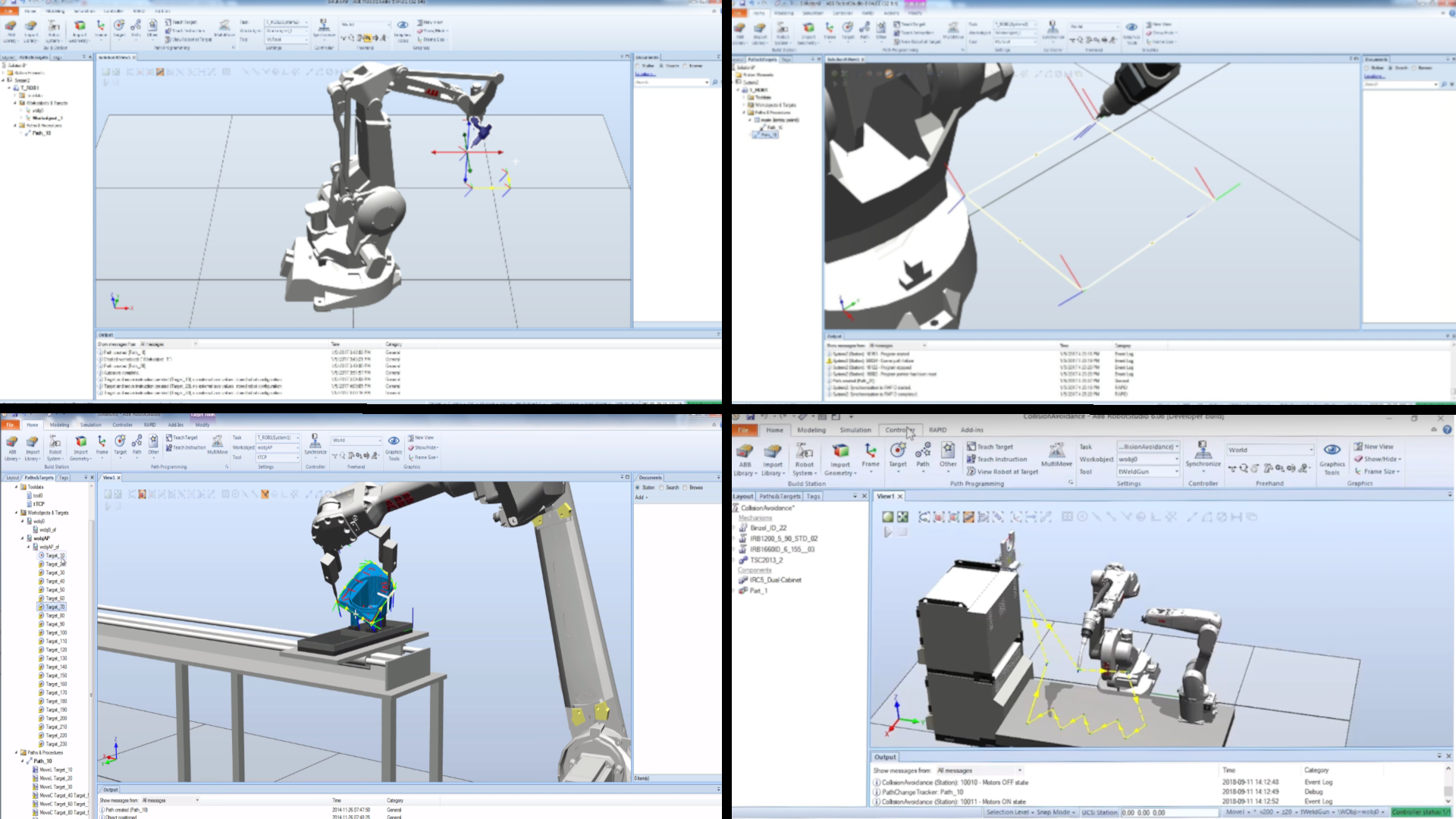
The robot arm simulation process can be separated into four main parts: creating work objects, importing models of a robot arm, tool object, and work object, planning the motion paths and running the simulation. Firstly, work objects are needed to be created using SolidWorks, a tool for creating 3D models. After creating work objects, they can be exported as a file and it can be used as an object in the simulation environment. Then, RobotStudio is used to do all the simulation tasks. The first step of the simulation is to import models of the robot arm, tool object, and work objects. Different robot arm model has different specifications such as move range and degrees of freedom. Therefore, the virtual robot arm model should match the physical robot arm. Then, a tool object will be imported as a tool used by the robot arm. Then, work objects, which will are the 3D models exported from SolidWorks, will be imported. The next step is to plan the motion paths. Lastly, simulation can be executed along the paths. After the simulation is well tested, the task can be deployed to a real robot arm.
The technical competencies include software tools such as SolidWorks and RobotStudio. In conclusion, By using such simulation platform, risk reduction, quicker start-up, shorter change-over, and increased productivity are archived.